Practice your sensor-based control theory with a robot
Welcome!
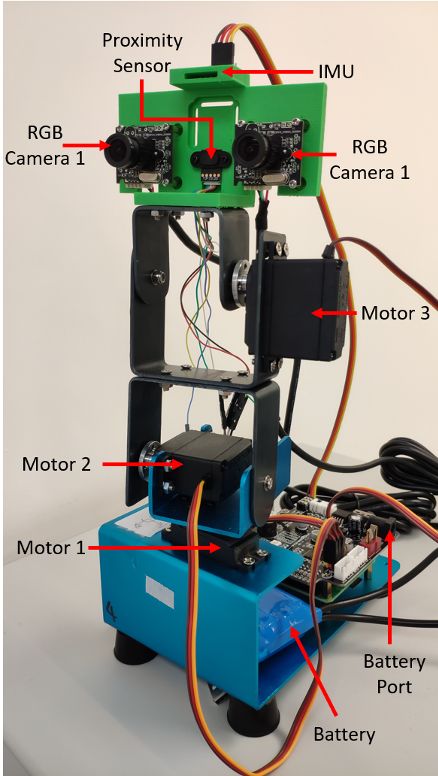
Robotic platform Mingo has 3 degrees of freedoms controlled by 3 step motors. It is equipped with 2 RGB cameras, 1 proximity sensor and 1 IMU.
Its controller is Raspberry Pi 4B, a strong single board computer which is capable of motor control, image processing and so on. A Unix-like operating system Raspbian is pre-installed in the Raspberry Pi 4B.