Advanced Matlab/Octave Tutorial -- Simulation
Simulation with Transfer Functions
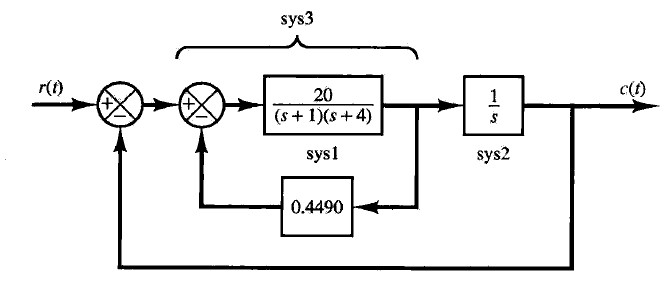
In previous sections, we have learnt how to represent a transfer function and do some simple analysis in Matlab. By now, you should be able to create simple simulations of dynamic systems as long as the transfer functions are available. Now, let's use an example to review the previous sections. Calculate the transfer function of the following system, give the step response, impulse response and time response with a sin input, and analyze the stability of the closed-loop system.
clc; clear;
close all;
%% Usage in Octave
% Uncomment the next line to use in Octave
%pkg load control;
%% Calculate transfer function
s = tf('s');
sys1 = 20/((s+1)*(s+4));
h1 = 0.4490;
G1 = feedback(sys1, h1, -1);
sys2 = 1/s;
G2 = series(G1, sys2);
h2 = 1;
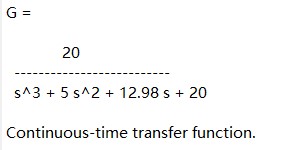
G = feedback(G2, h2, -1)
%% Time responses
t = 0:0.001:10;
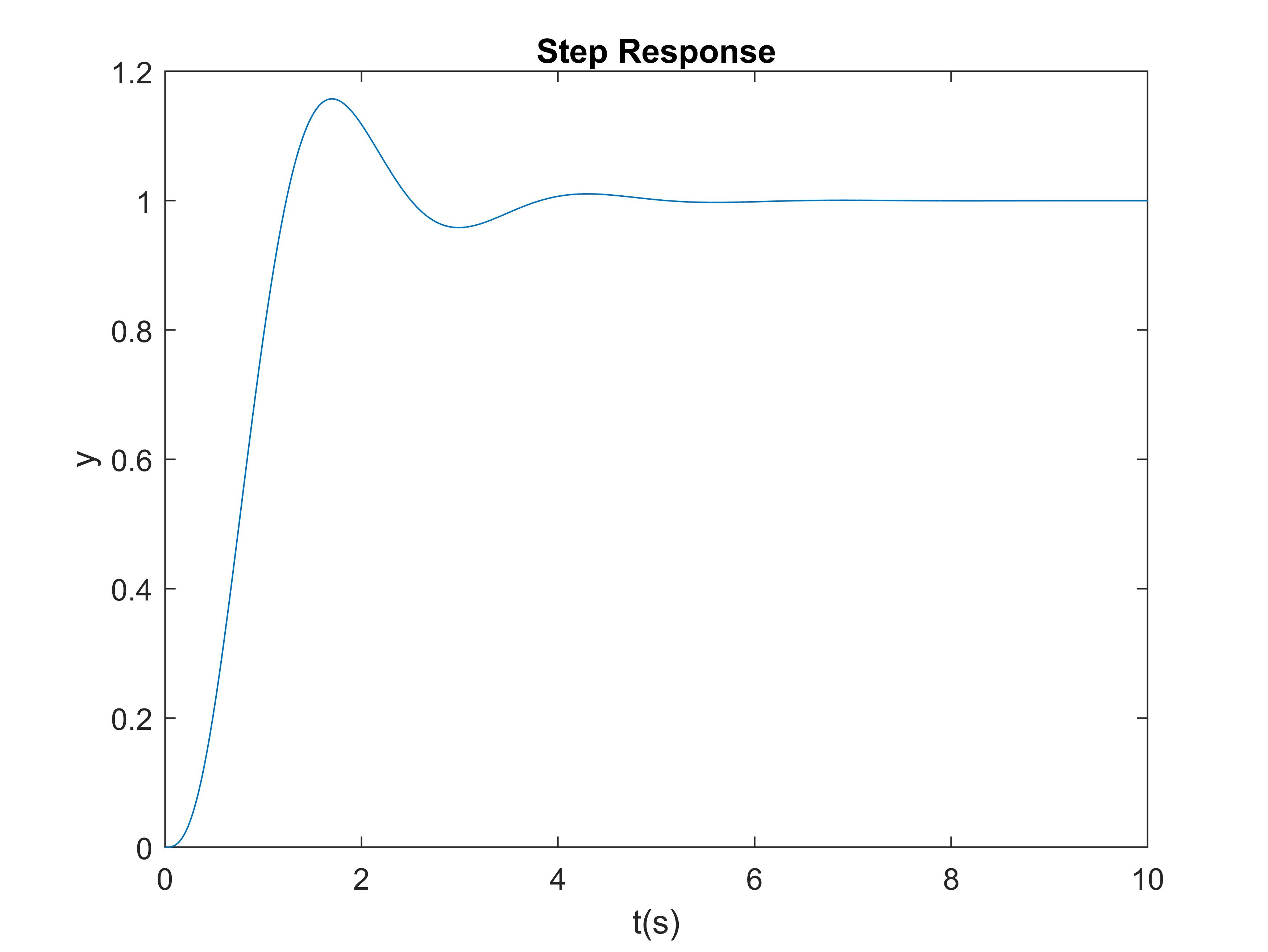
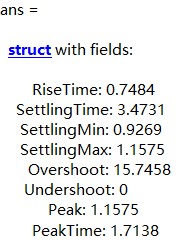
[y1, t] = step(G, t);
stepinfo(G)
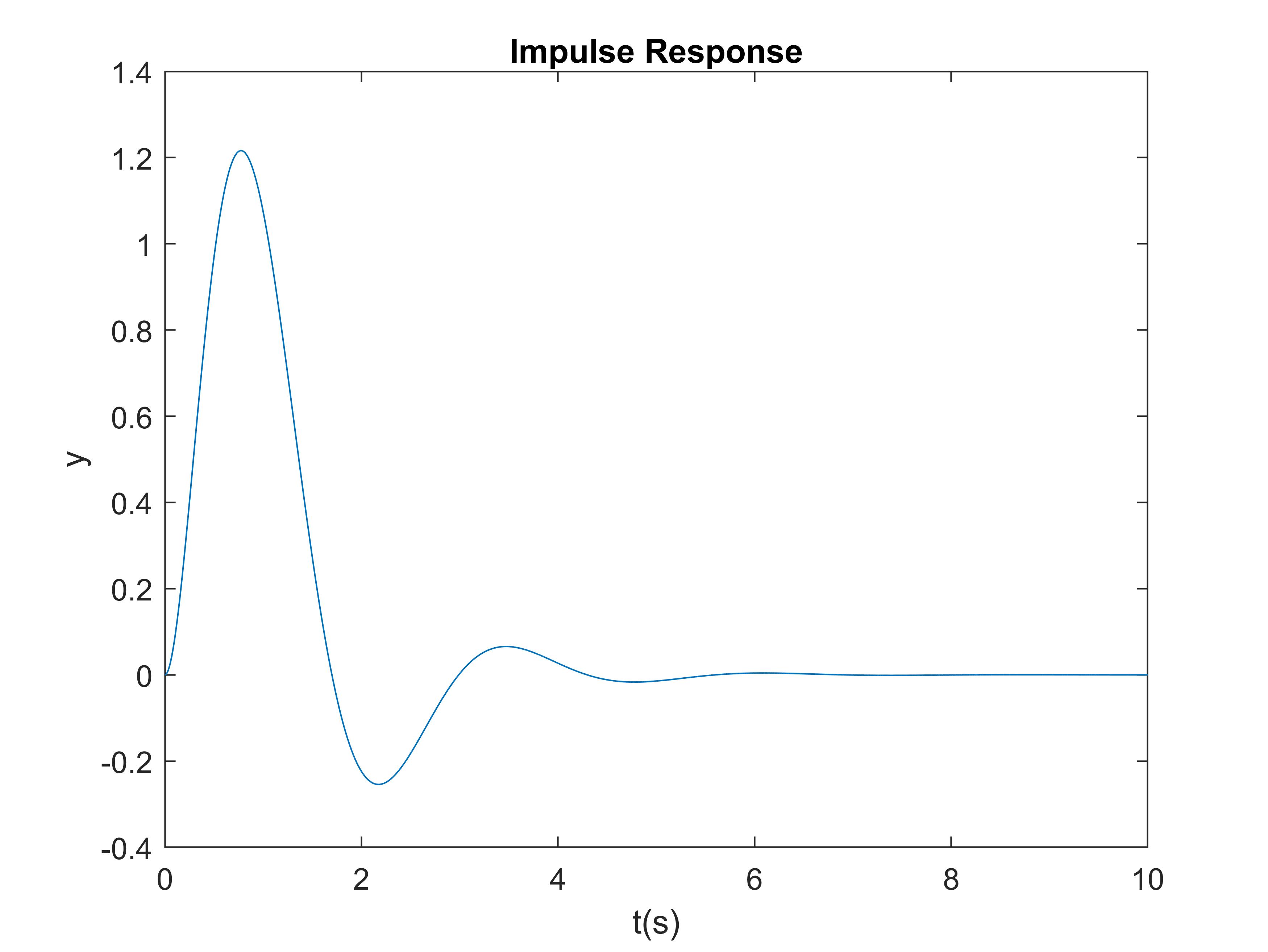
[y2, t] = impulse(G, t);
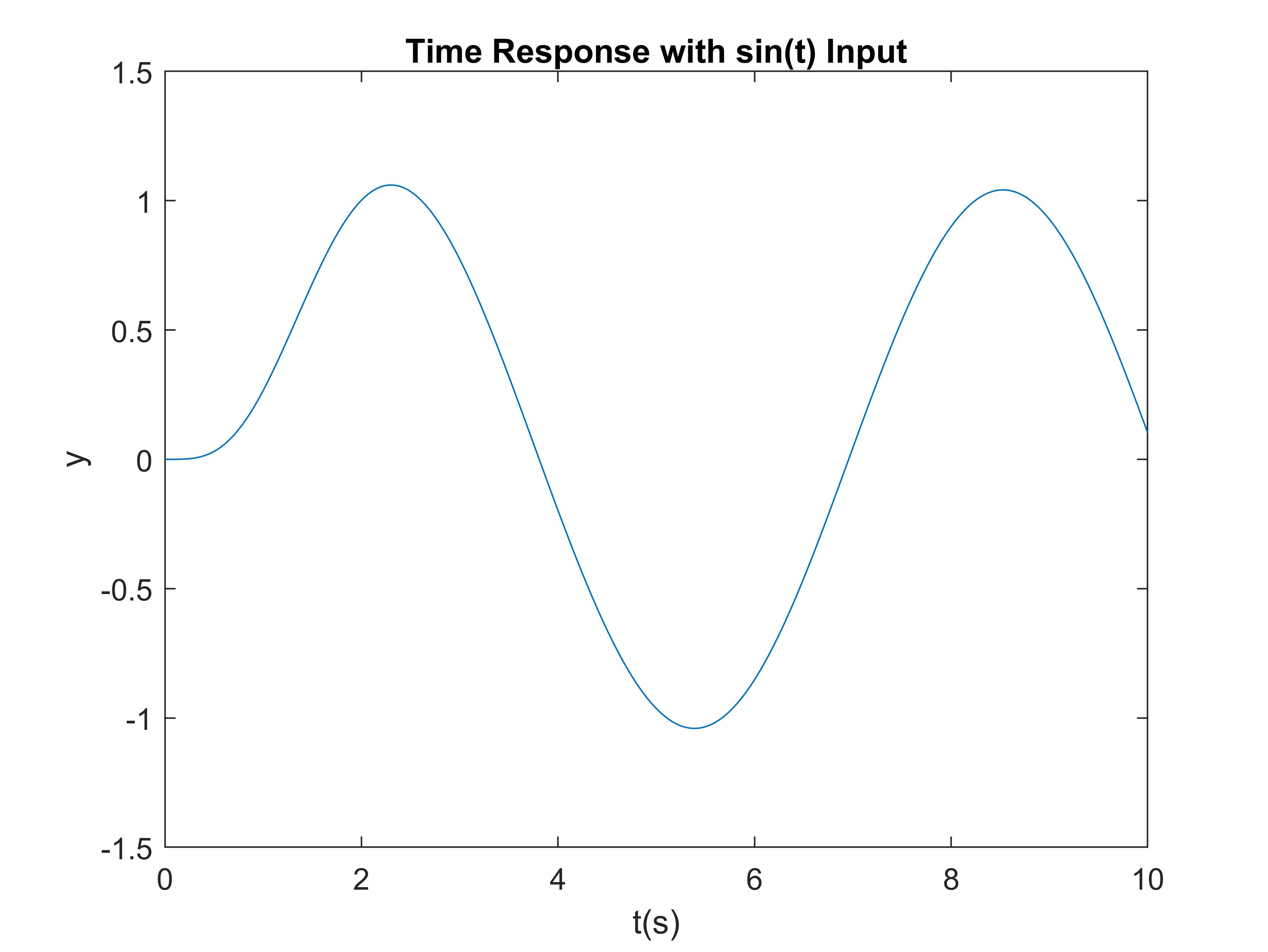
[y3, t] = lsim(G, sin(t), t);
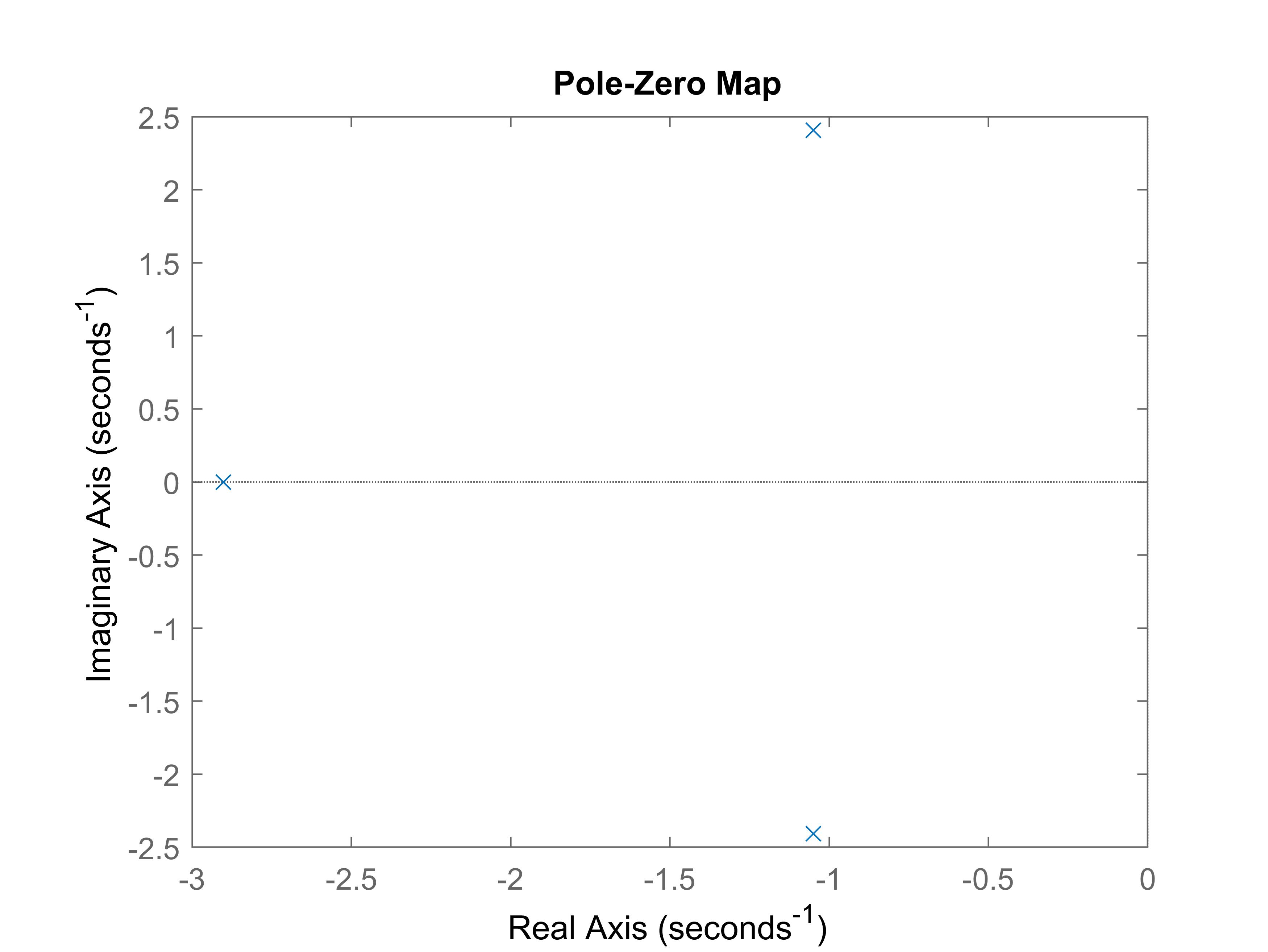
%% Stability analysis
p = pole(G)
%% Plotting
figure(1)
plot(t, y1);
xlabel('t(s)'); ylabel('y');
title('Step Response');
figure(2)
plot(t, y2);
xlabel('t(s)'); ylabel('y');
title('Impulse Response');
figure(3)
plot(t, y3);
xlabel('t(s)'); ylabel('y');
title('Time Response with sin(t) Input');
figure(4)
pzmap(G);
Simulation with ODEs
Although simulation with transfer function is very convenient in Matlab, it is not enough to handle all kinds of systems. For complex systems, such as nonlinear systems, it is always the case that we can only obtain the ordinary differential equations (ODEs) but not transfer functions, and the ODEs usually cannot be analytically solved. In this case, we need to numerically calculate the ODEs instead. Matlab provides abundant resources for numerically solving ODEs.
ODE Representation
To numerically solve the ODEs, the first step is to represent the ODEs with Matlab language. Generally, we need to create a function to represent the ODEs. The syntax is as follows.
function DY = Fun(t, Y)
...
DY(1,:) = f1(Y);
DY(2,:) = f2(Y);
...
end
function DY = Fun(t, Y, u)
...
DY(1,:) = f1(Y, u);
DY(2,:) = f2(Y, u);
...
end
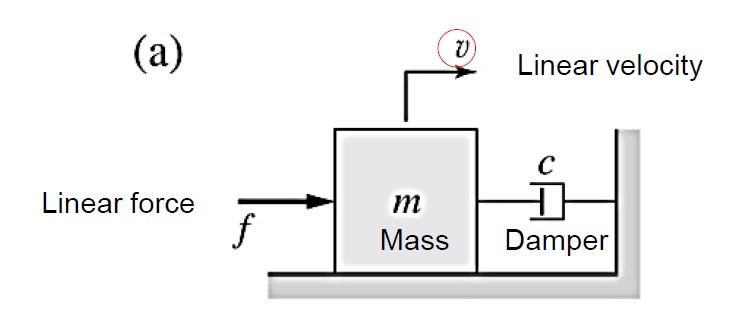
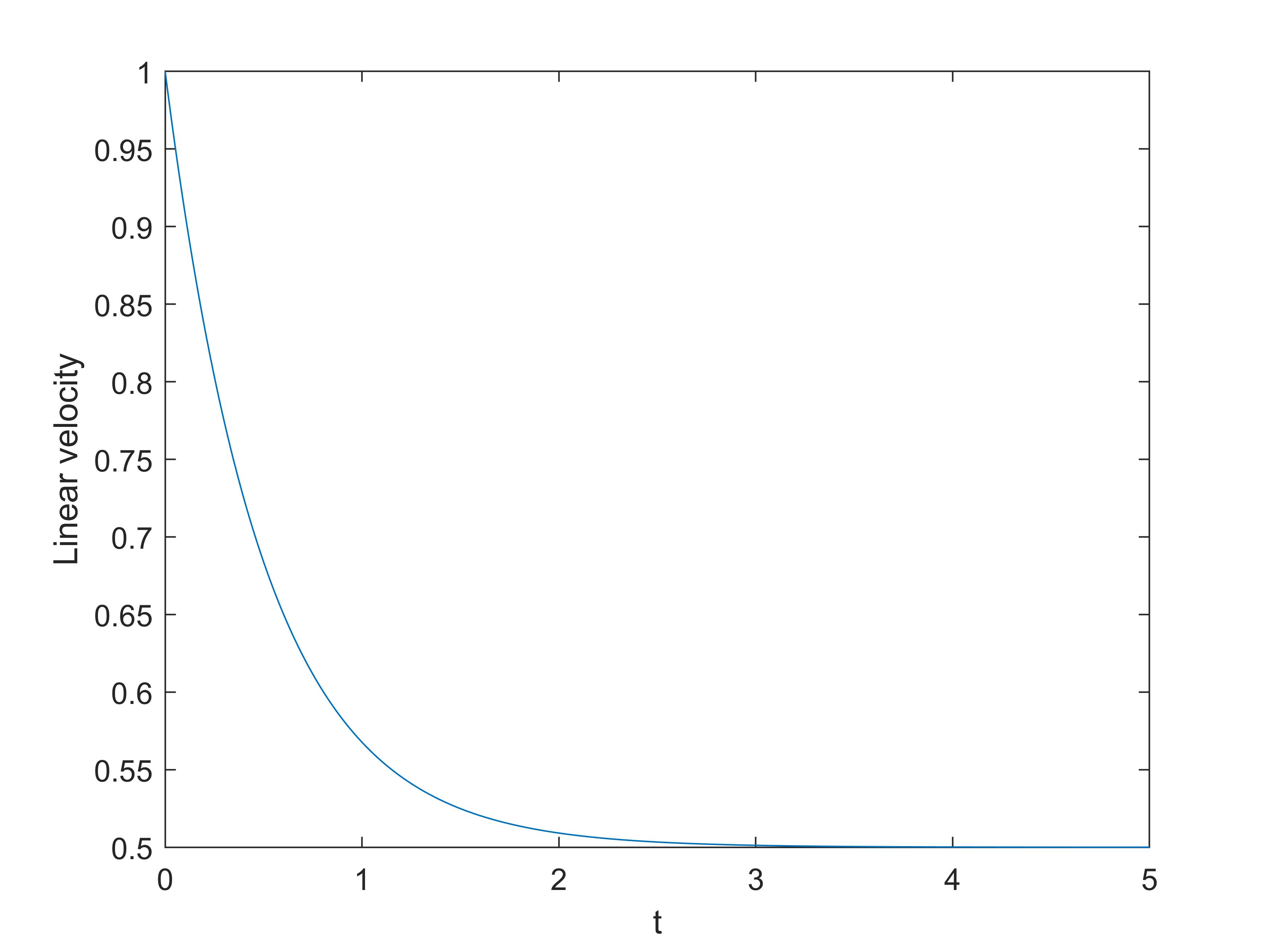
function dv = dynamics(t, v, f)
m = 1;
c = 2;
dv = -c/m*v + f;
end
Solvers
After we create the ODE function, we can call the solvers to solve the ODE. Matlab provides many ODE solvers. Among these solvers, the most commonly-used one is the "ode45" solver. When the ODE function is particularly expensive to evaluate, you can use "ode113" as an alternative. The syntax of using "ode45" to solve ODE functions is
[t, Y] = ode45('ODE_FUN', tspan, Y0, options);
options = odeset(Name, Value,...);
t = 0:0.001:5;
f = 1;
v0 = 1;
options = odeset('RelTol', 1e-6, 'AbsTol', 1e-6);
[~, v] = ode45(@(t, v)dynamics(t, v, f), t, v0, options);
figure(1)
plot(t, v);
xlabel('t'); ylabel('Linear velocity');